Reconcell Workcell DesignJan 1, 2017·Martin Bem,Barry Ridge· 1 min read PDF Cite Code Project Video ReconCell cell configured for car light assembly.TypeReportPublicationEU H2020 ReconCell ICT-680431 Project Technical ReportVideoLast updated on Jan 1, 2017 ← Rapid Hardware and Software Reconfiguration in a Robotic Workcell Jul 1, 2017Action-Grounded Surface Geometry and Volumetric Shape Feature Representations for Object Affordance Prediction Nov 1, 2016 →
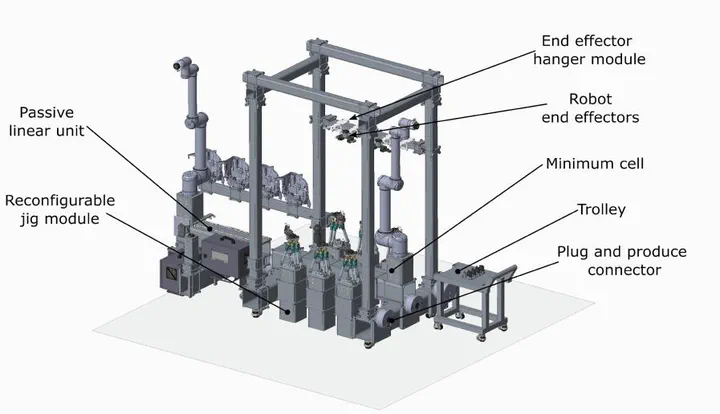 ReconCell cell configured for car light assembly.
ReconCell cell configured for car light assembly.
ReconCell cell configured for car light assembly.
ReconCell cell configured for car light assembly.