Base Frame Calibration of a Reconfigurable Multi-robot System with Kinesthetic Guidance
Sep 1, 2018·,,,·
1 min read
Timotej Gašpar
Robert Bevec
Barry Ridge
Aleš Ude
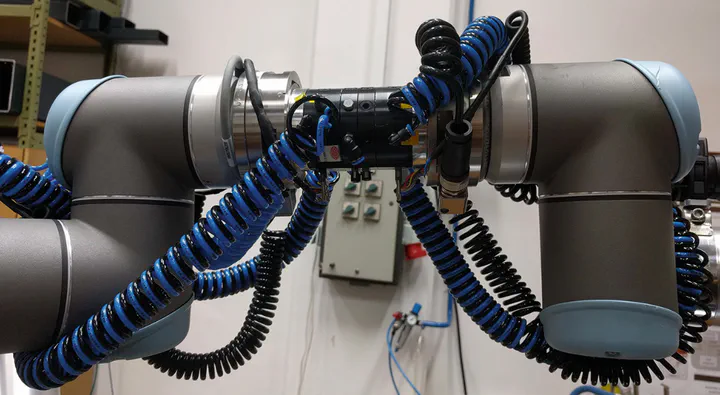 Two UR-10 robots coupled together with two Destaco TP-30.
Two UR-10 robots coupled together with two Destaco TP-30.Abstract
Reconfigurable manufacturing systems (RMS) provide means to deal with changes and uncertainties in highly dynamic production processes. They allow for a relatively quick adjustment of various modules within the production line. To further increase the flexibility of such systems, multiple robots can be used within. Multi-robot systems provide a higher degree of flexibility and efficiency compared to single-robot systems. These systems can perform tasks that require a high level of dexterity. However, in order to ensure the robots are able to precisely perform cooperative tasks, it is necessary to have a well calibrated system. In this paper, we present a novel approach for robot base frame calibration by exploiting the collaborative robots’ kinesthetic guidance feature. The developed method is suitable in RMS, as it is more time efficient and intuitive without drawbacks in precision.
Type
Publication
Proceedings of the 27th International Conference on Robotics in Alpe-Adria Danube Region (RAAD 2018)