Transfer of Assembly Operations to New Workpiece Poses by Adaptation to the Desired Force Profile
Nov 1, 2013·,,,,,,,,·
0 min read
Bojan Nemec
Fares J. Abu-Dakka
Barry Ridge
Aleš Ude
Jimmy A. Jørgensen
Thiusius Rajeeth Savarimuthu
Jerome Jouffroy
Henrik G. Petersen
Nobert Krüger
Abstract
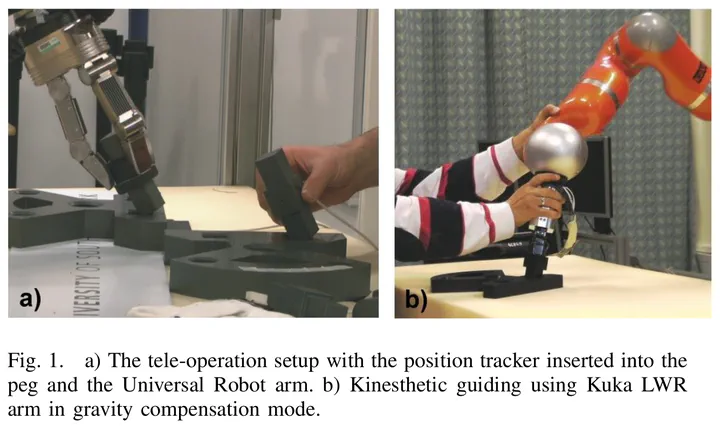
In this paper we propose a new algorithm that can be used for adaptation of robot trajectories in automated assembly tasks. Initial trajectories and forces are obtained by demonstration and iteratively adapted to specific environment configurations. The algorithm adapts Cartesian space trajectories to match the forces recorded during the human demonstration. Experimentally we show the effectiveness of our approach on learning of Peg-in-Hole (PiH) task. We performed our experiments on two different robotic platforms with workpieces of different shapes.
Type
Publication
2013 16th International Conference on Advanced Robotics (ICAR)