Towards Learning Basic Object Affordances from Object Properties
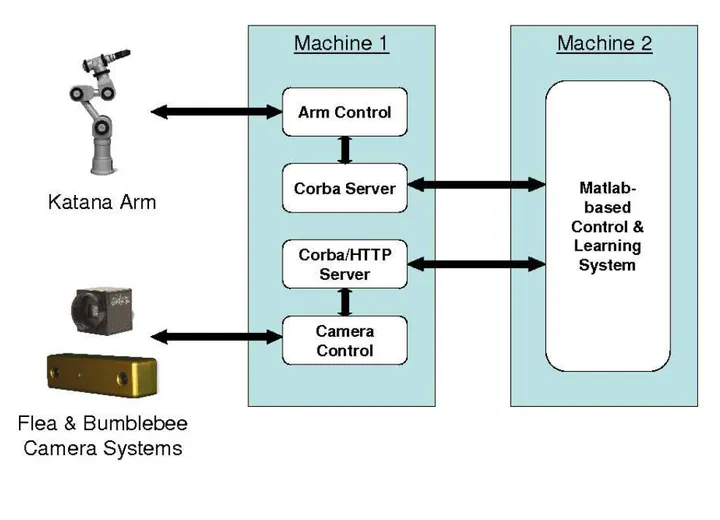 System architecture.
System architecture.Abstract
The capacity for learning to recognize and exploit environmental affordances is an important consideration for the design of current and future developmental robotic systems. We present a system that uses a robotic arm, camera systems and self-organizing maps to learn basic affordances of objects.
Type
Publication
Proceedings of the Eight International Conference on Epigenetic Robotics (EpiRob 2008)