A System for Learning Basic Object Affordances Using a Self-Organizing Map
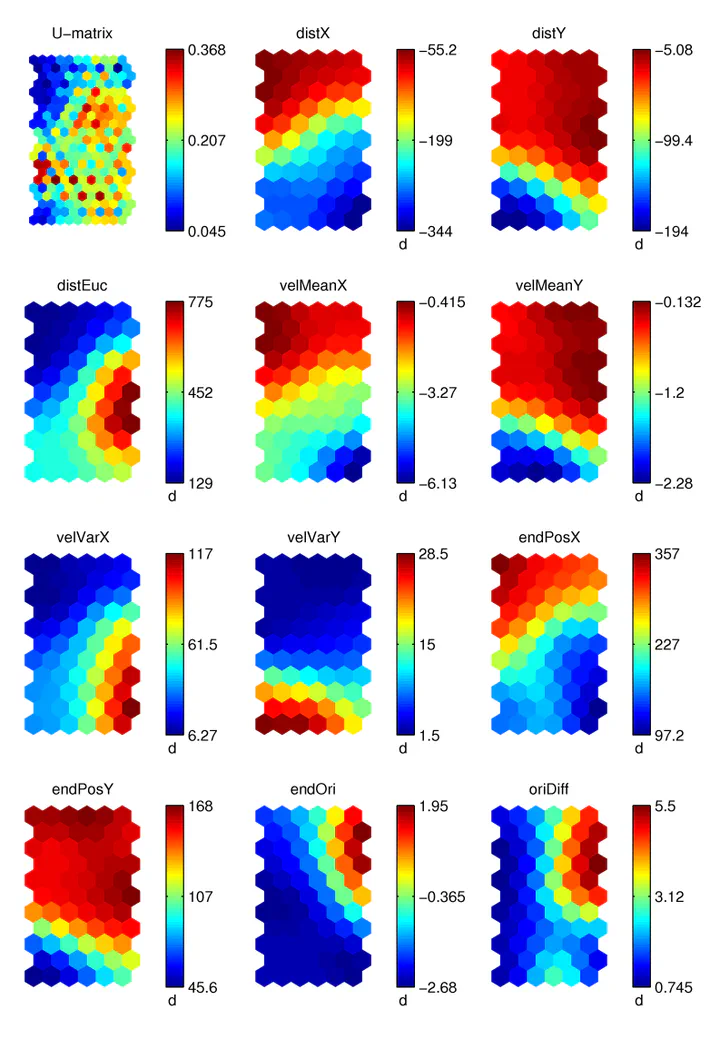 Example of SOM self-organization after 180 training steps using the full dataset.
Example of SOM self-organization after 180 training steps using the full dataset.Abstract
When a cognitive system encounters particular objects, it needs to know what effect each of its possible actions will have on the state of each of those objects in order to be able to make effective decisions and achieve its goals. Moreover, it should be able to generalize effectively so that when it encounters novel objects, it is able to estimate what effect its actions will have on them based on its experiences with previously encountered similar objects. This idea is encapsulated by the term
affordance'', e.g. a ball affords being rolled to the right when pushed from the left.’’ In this paper, we discuss the development of a cognitive vision platform that uses a robotic arm to interact with household objects in an attempt to learn some of their basic affordance properties. We outline the various sensor and effector module competencies that were needed to achieve this and describe an experiment that uses a self-organizing map to integrate these modalities in a working affordance learning system.Type
Publication
Proceedings of the First International Conference on Cognitive Systems (CogSys 2008)