Cut & Recombine: Reuse of Robot Action Components Based on Simple Language Instructions
Sep 1, 2019·,,,,,,,,,,,,,,,,·
0 min read
Minija Tamosiunaite
Mohamad Javad Aein
Jan Matthias Braun
Tomas Kulvicius
Irena Markievicz
Jurgita Kapociute-Dzikiene
Rita Valteryte
Andrei Haidu
Dimitrios Chrysostomou
Barry Ridge
Tomas Krilavicius
Daiva Vitkute-Adzgauskiene
Michael Beetz
Ole Madsen
Ales Ude
Norbert Krüger
Florentin Wörgötter
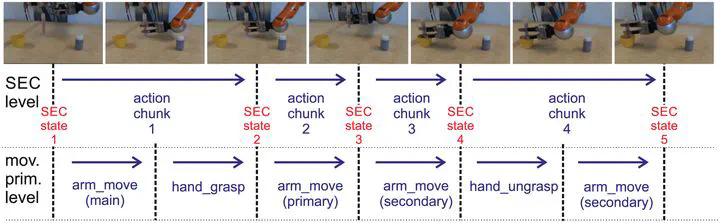 Temporal action structuring at two different hierarchical levels: semantic event chain (SEC) and movement primitives (mov. prim.).
Temporal action structuring at two different hierarchical levels: semantic event chain (SEC) and movement primitives (mov. prim.).Abstract
Human beings can generalize from one action to similar ones. Robots cannot do this and progress concerning information transfer between robotic actions is slow. We have designed a system that performs action generalization for manipulation actions in different scenarios. It relies on an action representation for which we perform code-snippet replacement, combining information from different actions to form new ones. The system interprets human instructions via a parser using simplified language. It uses action and object names to index action data tables (ADTs), where execution-relevant information is stored. We have created an ADT database from three different sources (KUKA LWR, UR5, and simulation) and show how a new ADT is generated by cutting and recombining data from existing ADTs. To achieve this, a small set of action templates is used. After parsing a new instruction, index-based searching finds similar ADTs in the database. Then the action template of the new action is matched against the information in the similar ADTs. Code snippets are extracted and ranked according to matching quality. The new ADT is created by concatenating code snippets from best matches. For execution, only coordinate transforms are needed to account for the poses of the objects in the new scene. The system was evaluated, without additional error correction, using 45 unknown objects in 81 new action executions, with 80% success. We then extended the method including more detailed shape information, which further reduced errors. This demonstrates that cut & recombine is a viable approach for action generalization in service robotic applications.
Type
Publication
The International Journal of Robotics Research