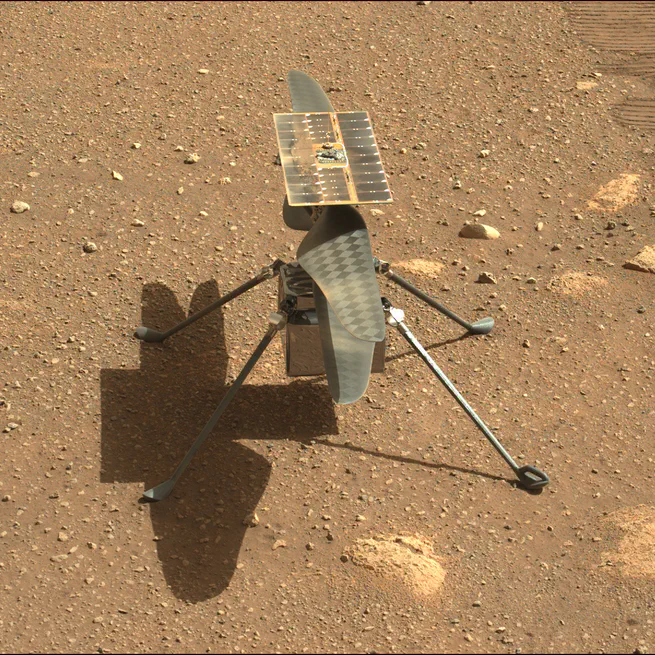
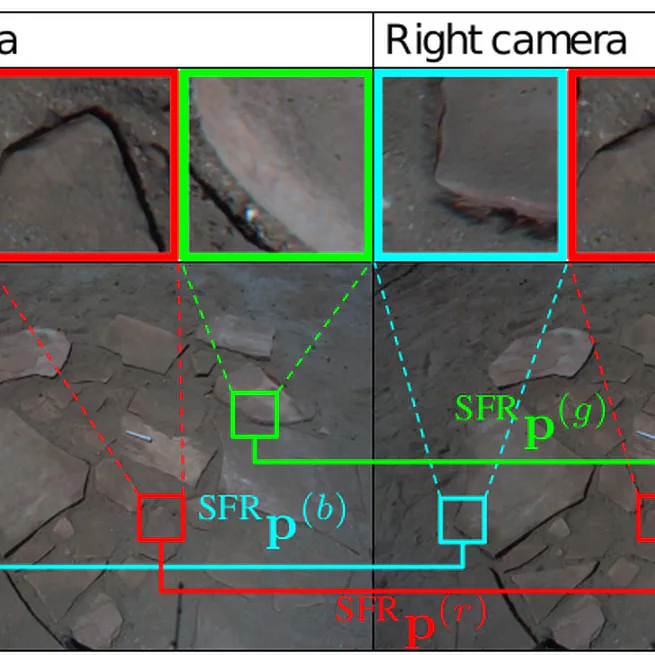
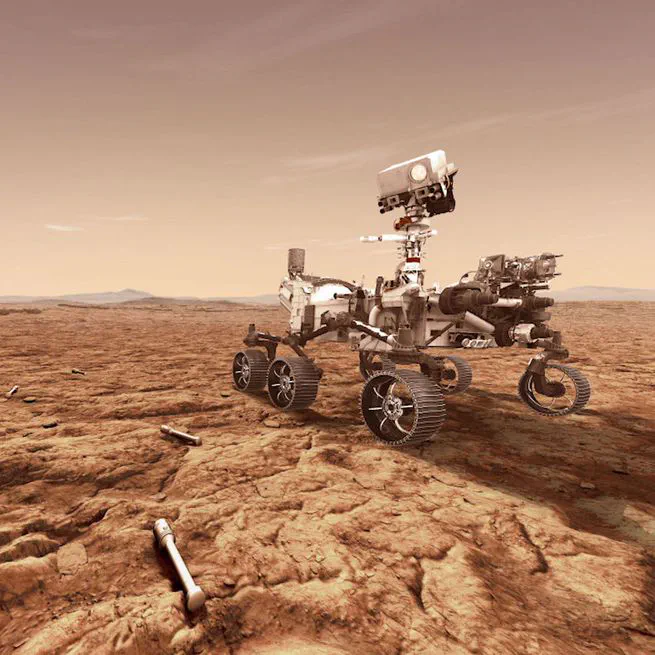
Onboard Autonomous Health Assessment and Global Localization for the Mars Helicopter: Towards Multi-Flight Operations.
IEEE Transactions on Field Robotics (Under Review),
2025.



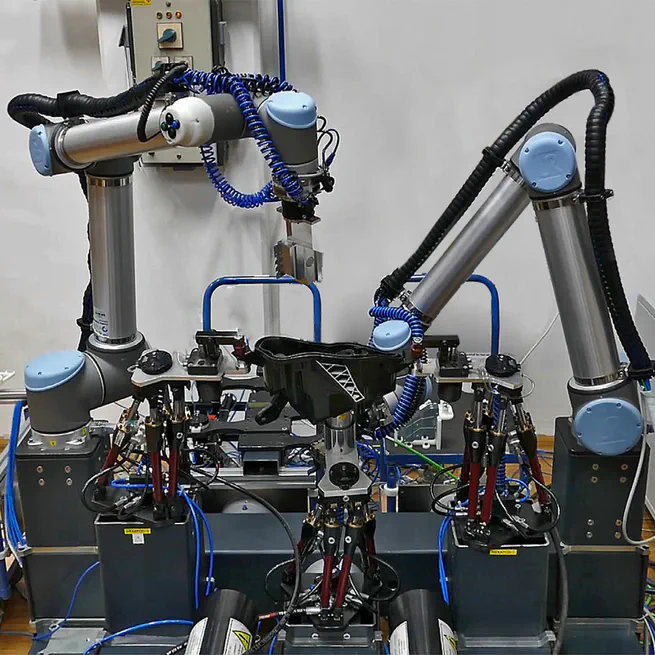
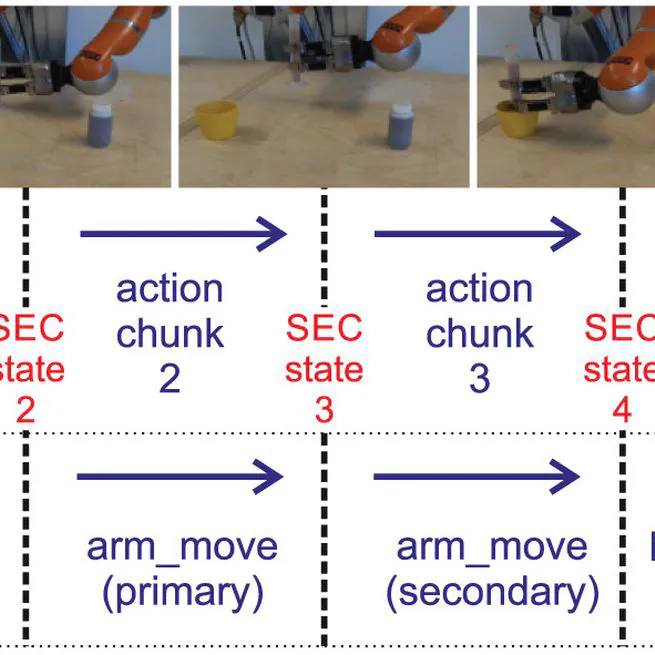
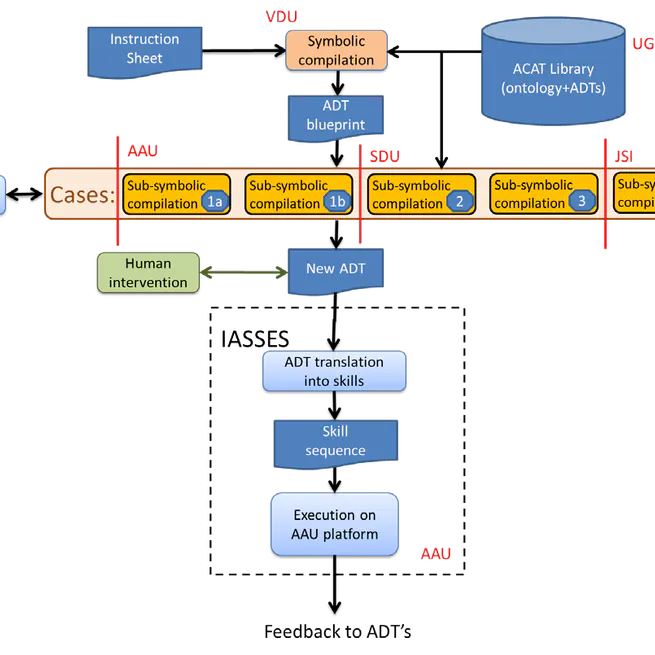
Cut & Recombine: Reuse of Robot Action Components Based on Simple Language Instructions.
The International Journal of Robotics Research,
2019.
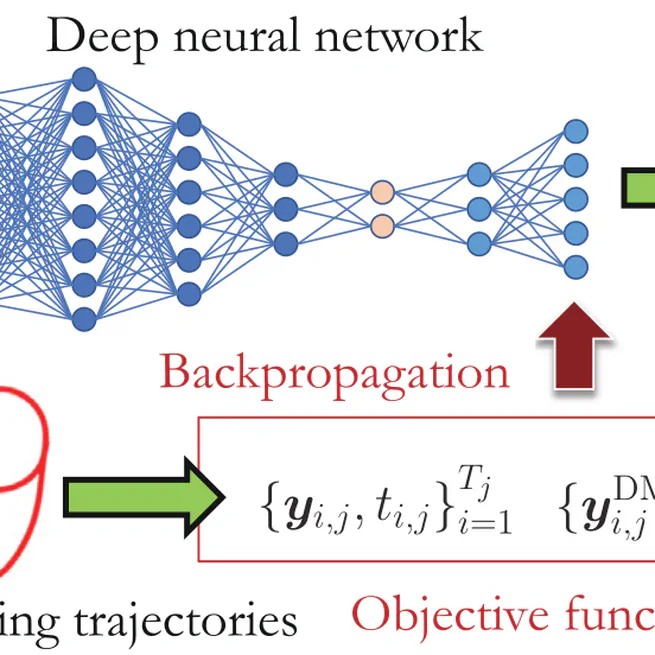
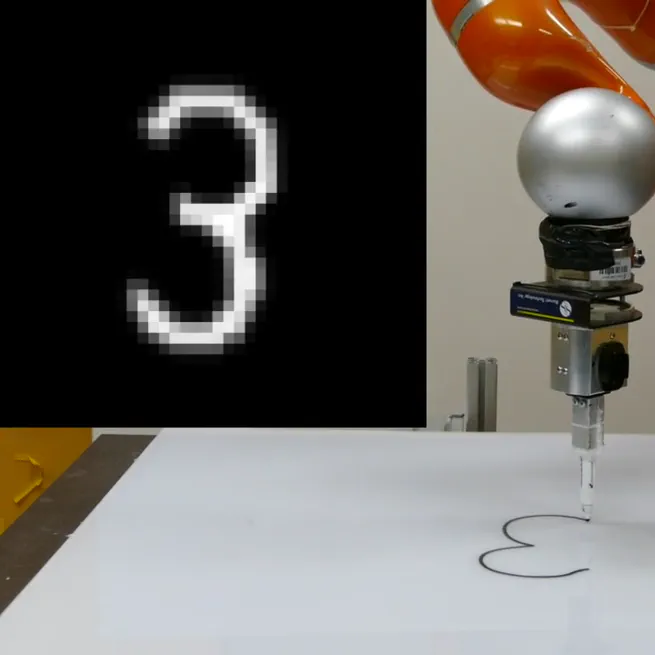
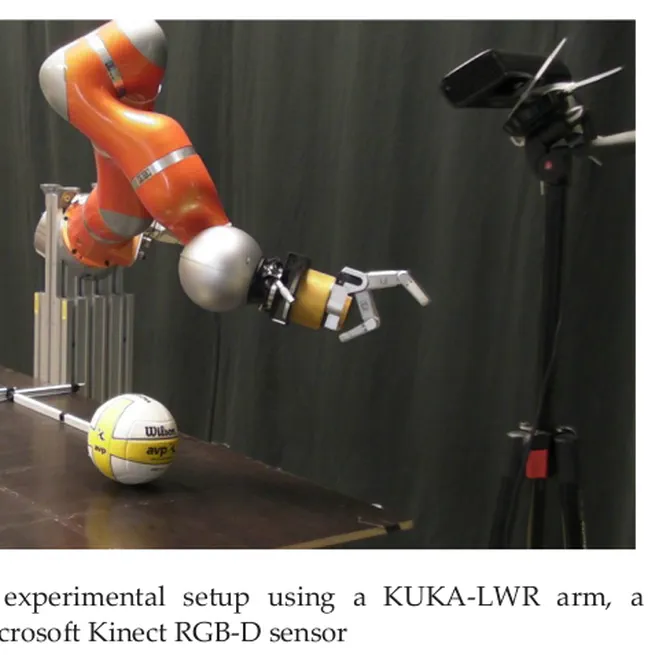
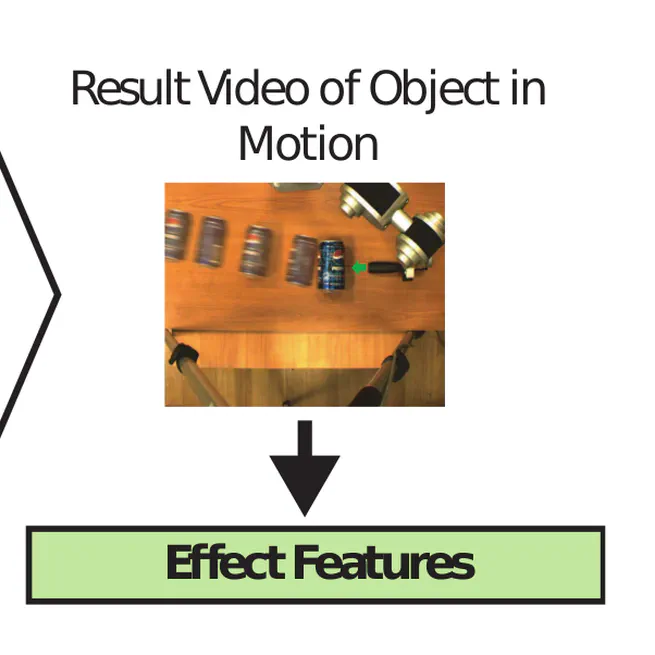
Convolutional Encoder-Decoder Networks for Robust Image-to-Motion Prediction.
Proceedings of the 28th International Conference on Robotics in Alpe-Adria-Danube Region (RAAD 2019),
2019.

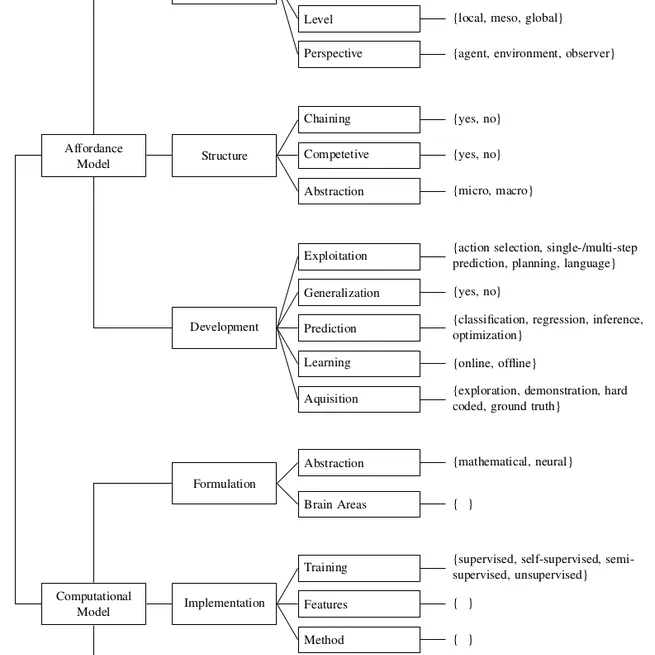
Computational Models of Affordance in Robotics: A Taxonomy and Systematic Classification.
Adaptive Behavior,
2017.

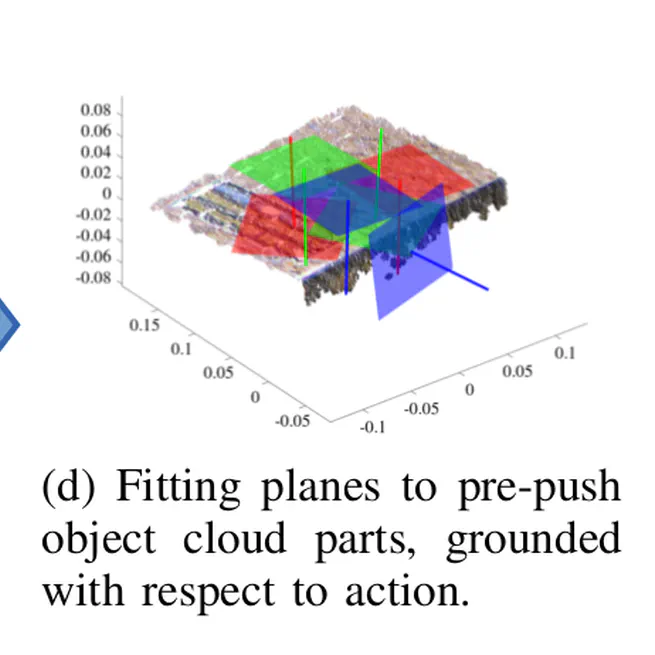
Action-Grounded Surface Geometry and Volumetric Shape Feature Representations for Object Affordance Prediction.
2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids),
2016.
Robotic Affordance Learning: Old Ideas, Recent Developments, and Potential Paths Forward.
Robotics in the 21st Century: Challenges and Promises - International Workshop,
2016.
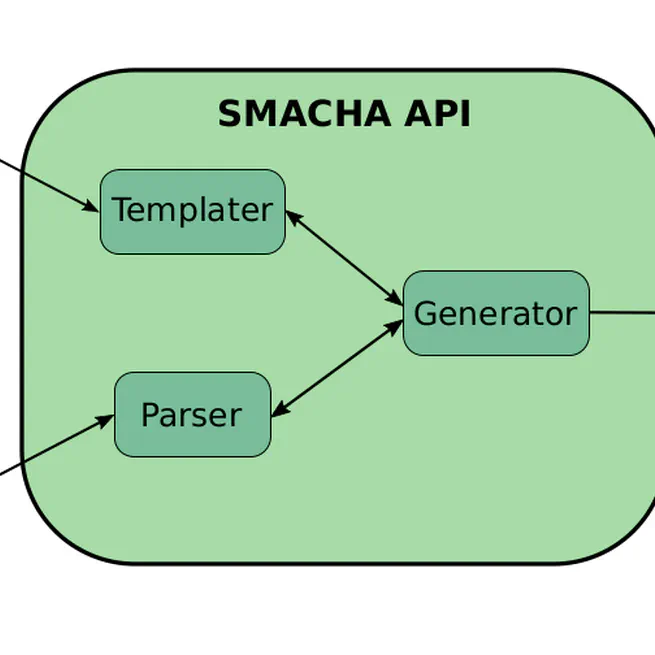
D6.3: Repositories of Software, Data Bases and Benchmarks.
EU FP7 ACAT ICT-600578 Project Year 3 Deliverable,
2016.
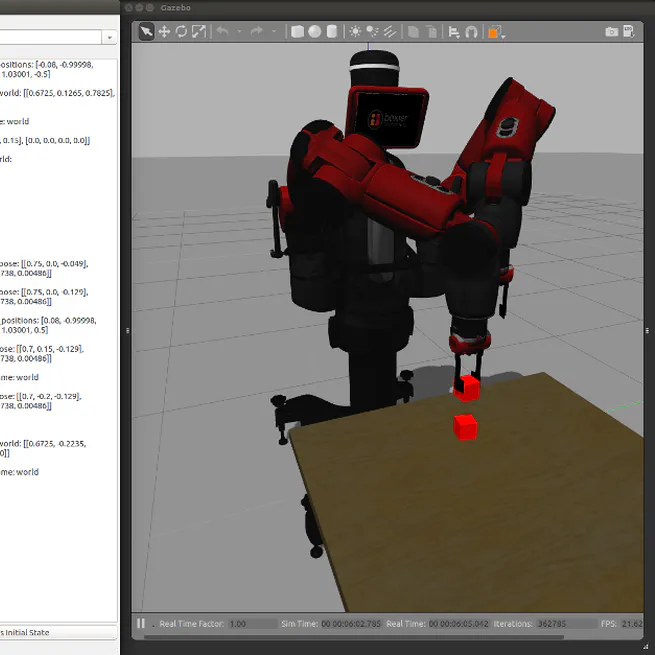
D4.4: Action Execution.
EU FP7 ACAT ICT-600578 Project Year 3 Deliverable,
2016.
Comparison of Action-Grounded and Non-Action-Grounded 3-D Shape Features for Object Affordance Classification.
2015 International Conference on Advanced Robotics (ICAR),
2015.
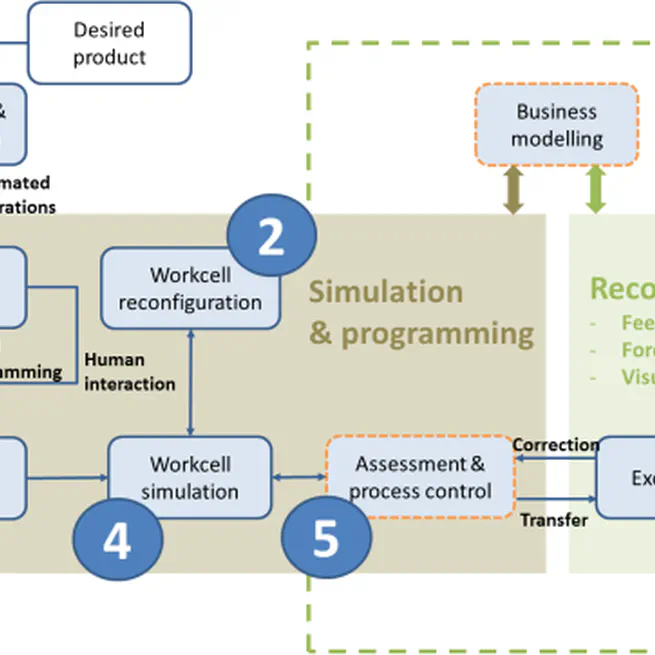
D5.4: Demonstrator of Intermediate Integration of the System.
EU FP7 ACAT ICT-600578 Project Year 2 Deliverable,
2015.
D2.3.3: Transfer of Affordances and Categories: Technical Report or Scientific Publication on How to Use the Developed Representations of Affordances and Categories within the Architecture and in the Final Demonstration.
EU FP7 Xperience ICT-270273 Project Year 5 Deliverable,
2015.

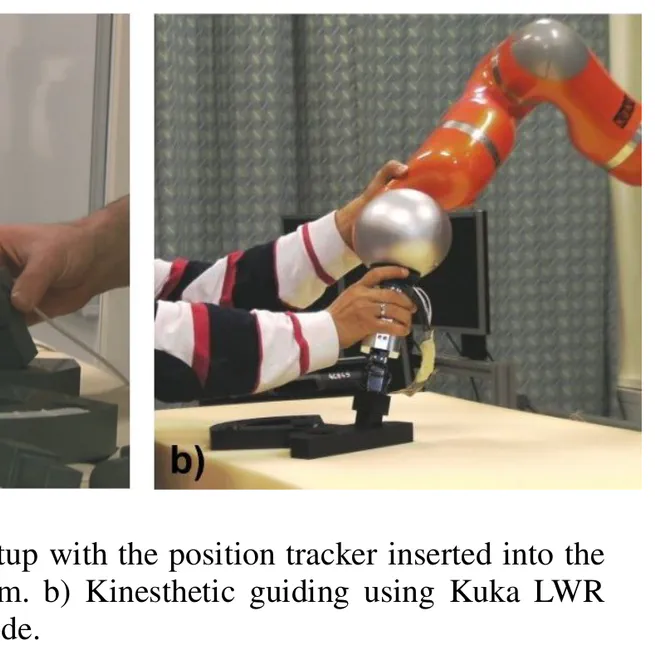
Transfer of Assembly Operations to New Workpiece Poses by Adaptation to the Desired Force Profile.
2013 16th International Conference on Advanced Robotics (ICAR),
2013.
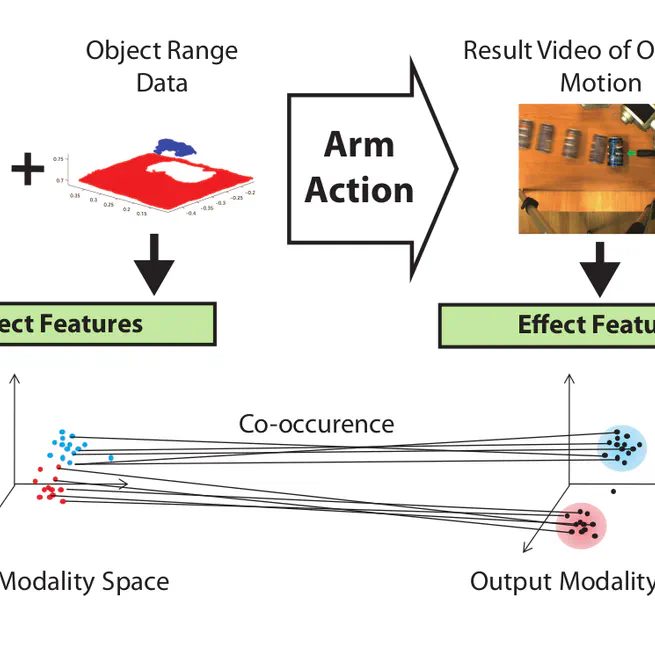
Action-Grounded Push Affordance Bootstrapping of Unknown Objects.
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems,
2013.

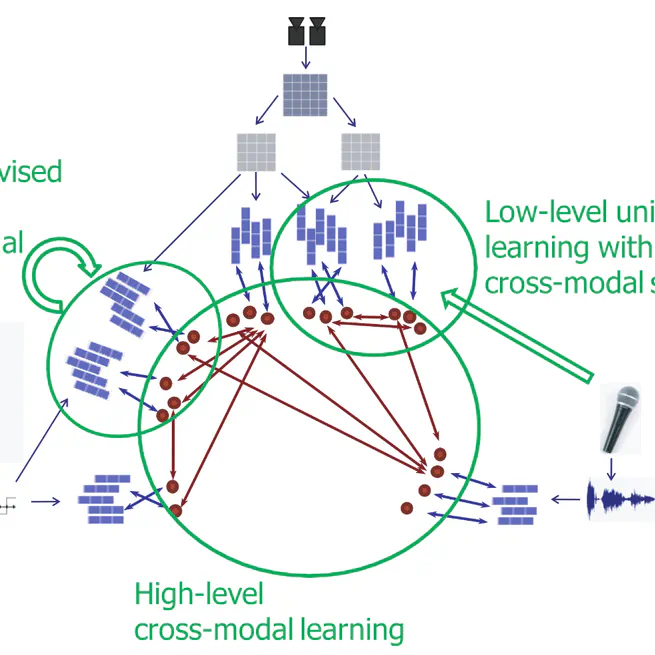
DR 5.5: Combining Basic Cross-Modal Concepts into Novel Concepts.
EU FP7 CogX ICT-215181 Project Year 4 Deliverable,
2012.

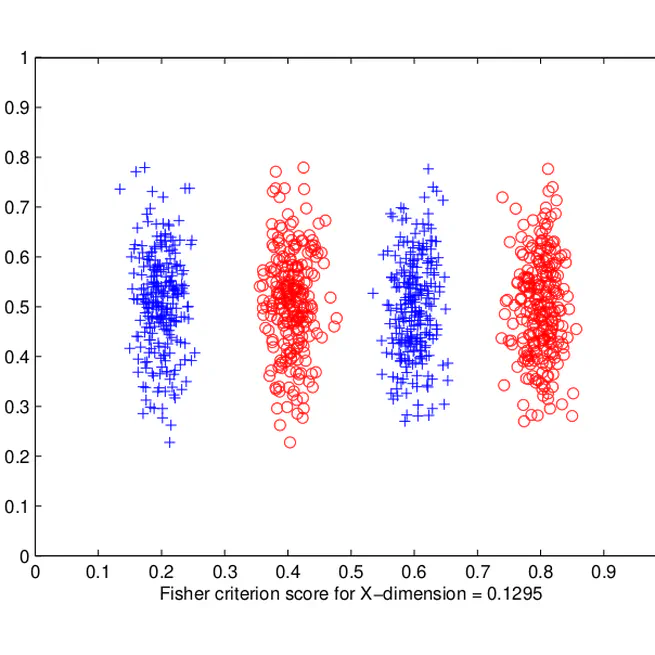
Relevance Determination for Learning Vector Quantization Using the Fisher Criterion Score.
Proceedings of the Seventeenth Computer Vision Winter Workshop (CVWW 2012),
2012.
DR 5.4: Active Learning of Cross-Modal Concepts.
EU FP7 CogX ICT-215181 Project Year 3 Deliverable,
2011.

DR 5.2: Continuous Learning of Cross-Modal Concepts.
EU FP7 CogX ICT-215181 Project Year 2 Deliverable,
2010.
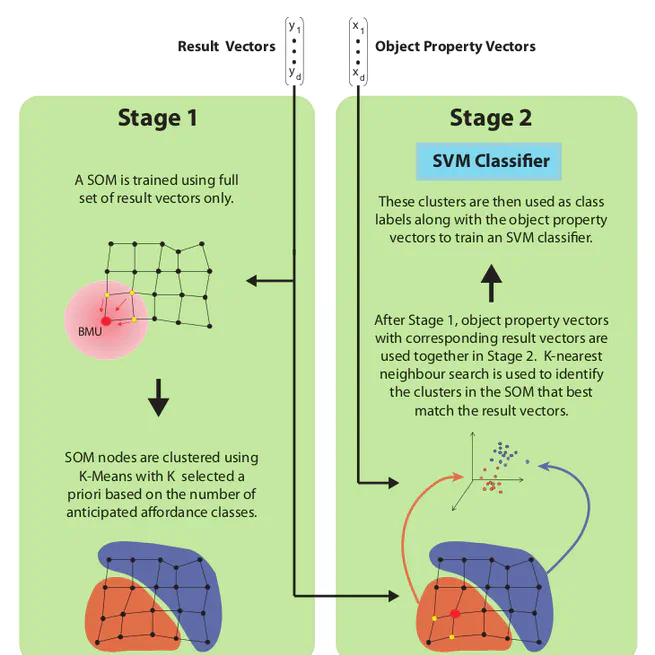
Towards Learning Basic Object Affordances from Object Properties.
Proceedings of the Eight International Conference on Epigenetic Robotics (EpiRob 2008),
2008.
A System for Learning Basic Object Affordances Using a Self-Organizing Map.
Proceedings of the First International Conference on Cognitive Systems (CogSys 2008),
2008.
A Framework for Continuous Learning of Simple Visual Concepts.
Proceedings of the Twelveth Computer Vision Winter Workshop (CVWW 2007),
2007.
Interaktiven Sistem Za Kontinuirano Učenje Vizualnih Konceptov.
Proceedings of the Sixteenth Electrotechnical and Computer Science Conference (ERK 2007),
2007.
DR 5.6: Framework for Continuous Learning with Different Levels of Supervision: Cognitive Systems for Cognitive Assistants.
EU FP6 CoSy FP6-004250 Project Year 3 Deliverable,
2007.

DR.5.4: Object Models Suitable for Continuous and Human-Assisted Learning.
EU FP6 CoSy FP6-004250 Project Year 3 Deliverable,
2006.

On Different Modes of Continuous Learning of Visual Properties.
Proceedings of the Fifteenth Electrotechnical and Computer Science Conference (ERK 2006),
2006.