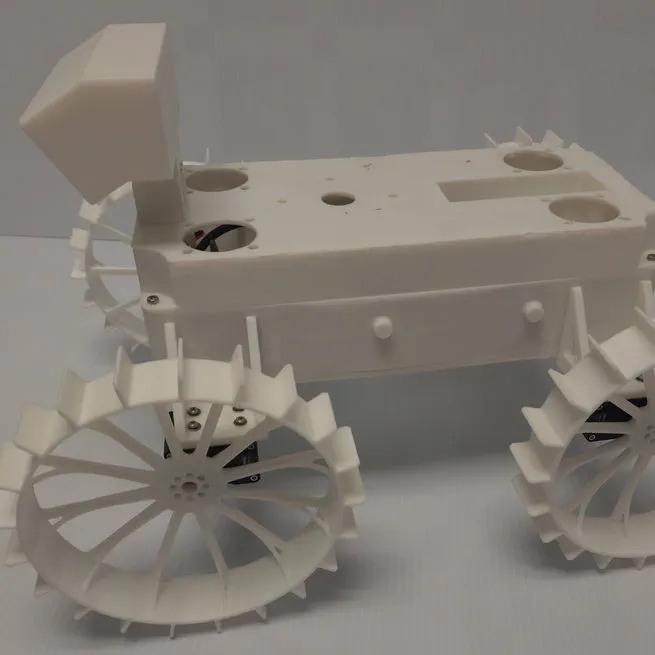
CoHORT: Cooperative Human Operations with Robot Teams
The CoHORT project aims to develop a fleet of small rovers to be used as academic research and development platforms for research on multi-agent autonomy.
Sep 3, 2024 – Nov 5, 2025

Ingenuity Mars Helicopter
The Ingenuity Mars Helicopter was the first aircraft to achieve powered, controlled flight on another planet.
Aug 1, 2022 – Feb 7, 2024

CADRE: Cooperative Autonomous Distributed Robotic Exploration
The CADRE technology demonstration aims to utilize a team of small, solar-powered rovers to independently explore and gather data from the Moon using mesh network radios for communication.
Jan 1, 2022 – Feb 7, 2024

Europa Lander
The proposed Europa Lander mission is a concept study aimed at delivering a robotic lander to the ice-covered surface of Jupiter’s moon, Europa.
Jan 1, 2022 – Feb 1, 2023

DARPA RACER: Robotic Autonomy in Complex Environments with Resiliency
DARPA's RACER program aims to revolutionize autonomy for unmanned ground vehicles (UGVs) navigating unpredictable off-road terrain at speeds comparable to human drivers.
Sep 30, 2021 – Aug 31, 2022

DARPA Subterranean Challenge
The DARPA Subterranean (SubT) Challenge was a landmark competition aimed at developing autonomous robot teams capable of mapping, navigating, and searching underground environments.
Jan 1, 2021 – Sep 30, 2021
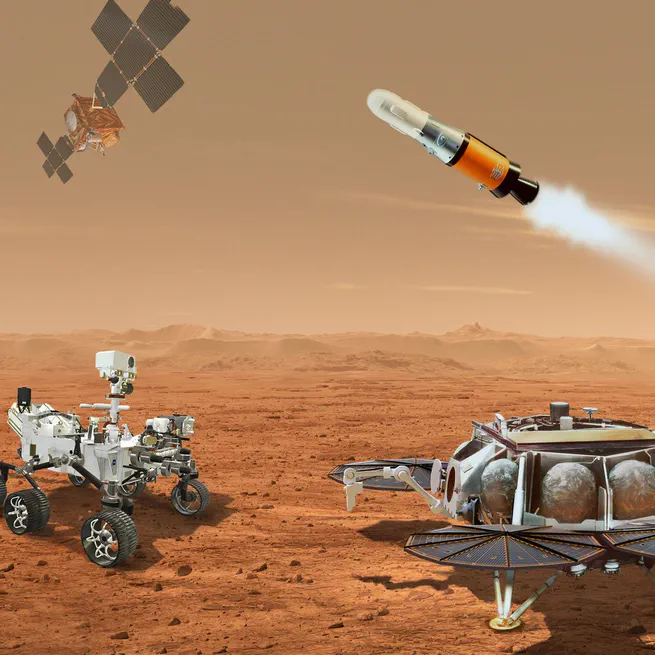
Mars Sample Return
The Mars Sample Return (MSR) mission, a joint effort between NASA and ESA, seeks to retrieve Martian rock, soil, and atmospheric samples collected by Perseverance and return them to Earth for in-depth analysis.
Feb 24, 2020 – Sep 1, 2021
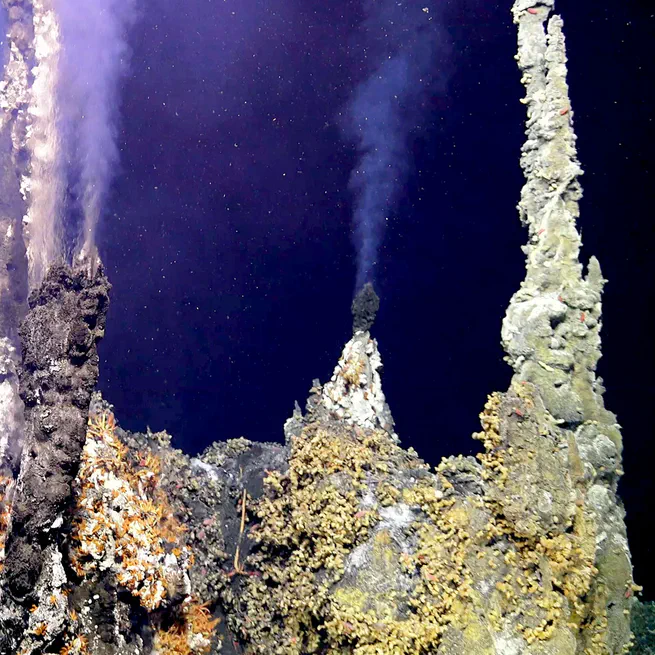
InVADER: In situ Vent Analysis Divebot for Exobiology Research
InVADER is an innovative deep-sea mission concept to send autonomous divebots underwater to perform in-situ analysis of hydrothermal vent sites.
Sep 24, 2020 – Sep 1, 2021
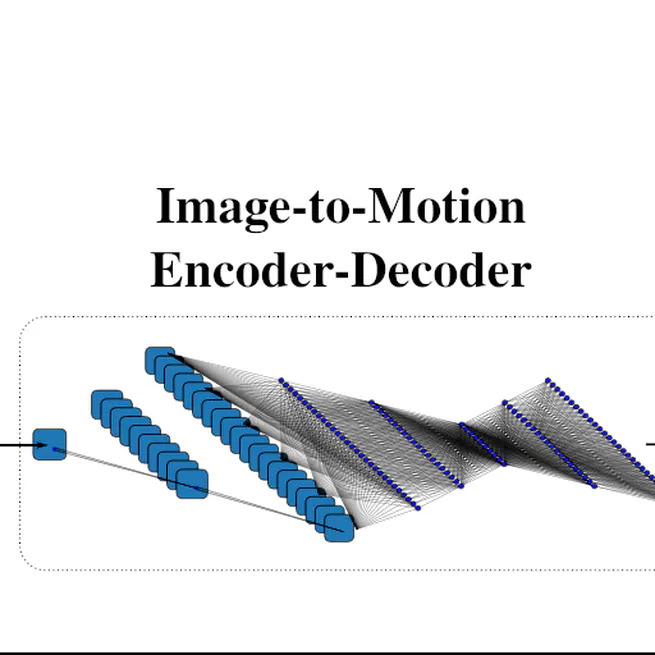
IMEDNets: Image-to-Motion Encoder-Decoder Networks
IMEDNets are deep neural network architectures to enable robots to learn visuomotor skills, specifically translating visual inputs into robot motion trajectories.
May 1, 2018 – Feb 7, 2020
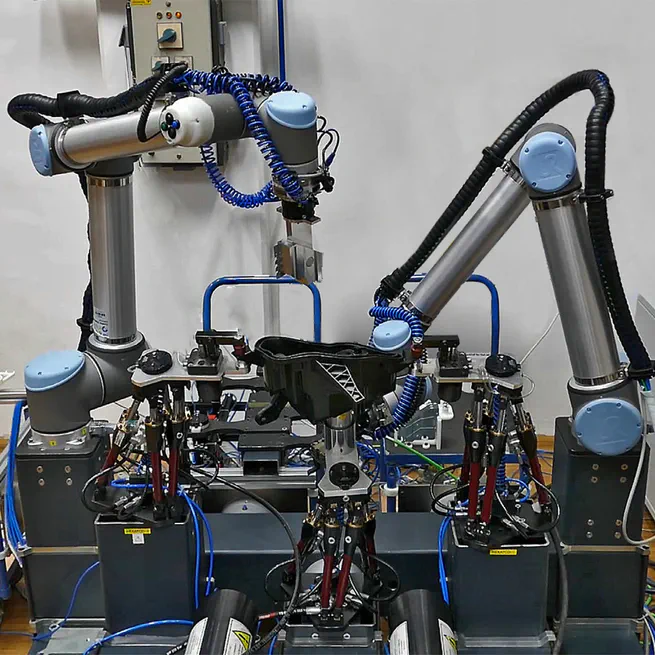
ReconCell: A Reconfigurable Robot Workcell
ReconCell was a reconfigurable robot workcell conceived to give low-volume, high-mix manufacturers the agility of large-scale automation without the overhead.
Nov 1, 2015 – Feb 28, 2019
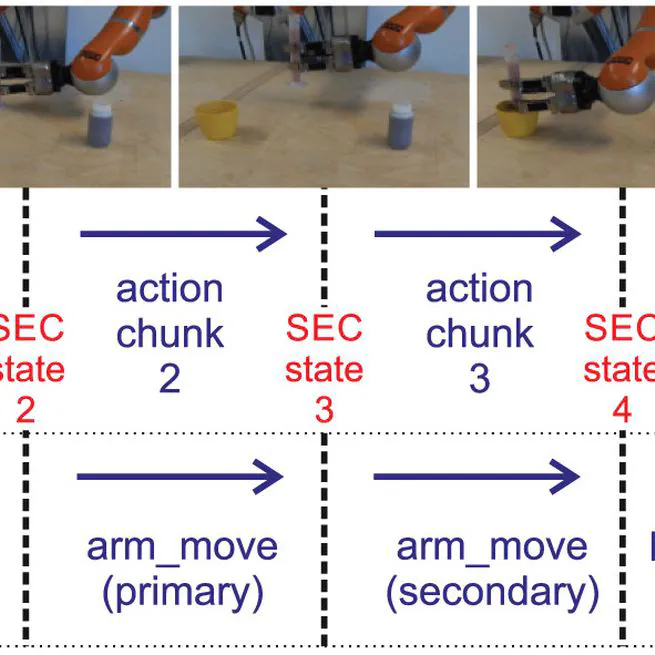
ACAT: Learning and Execution of Action Categories
The goal of the ACAT project was to equip robots with the tacit background humans assume by encoding every task’s key motions, objects, and context into reusable 'Action Categories.'
Mar 1, 2013 – Apr 30, 2016
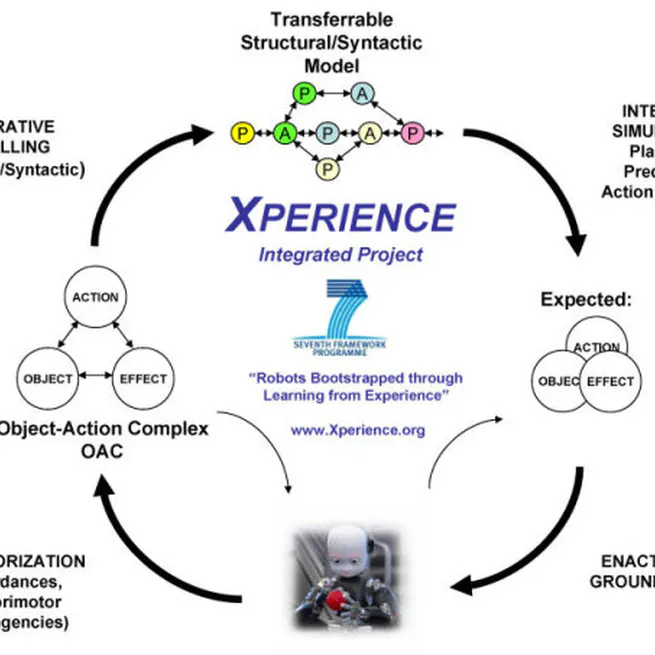
Xperience: Robots Bootstrapped through Learning from Experience
Xperience: Robots Bootstrapped through Learning from Experience Xperience was an EU FP7 project that investigated how robots could build on what they already know to handle new situations instead of learning every skill from scratch.
Mar 1, 2012 – Dec 31, 2015

CogX: Cognitive Systems that Self-Understand and Self-Extend
CogX was a project that devised a cognitive-robotics architecture enabling mobile robots like the Dora platform to recognize gaps in their knowledge and autonomously choose sensing, dialogue or manipulation actions to learn and extend their capabilities.
Jan 1, 2009 – Jun 30, 2012

CoSy: Cognitive Systems for Cognitive Assistants
The CoSy project undertook a coordinated, multidisciplinary study of the design requirements and trade-offs needed to endow integrated robots with human-like autonomy and advance the science of cognitive systems.
Jan 1, 2006 – Aug 31, 2008

VISIONTRAIN: Computational and Cognitive Vision Systems
VISIONTRAIN was an EU FP6 Marie Curie Research Training Network that addressed the problem of understanding vision from both computational and cognitive points of view.
Jan 1, 2006 – Apr 30, 2009