ACAT: Learning and Execution of Action Categories
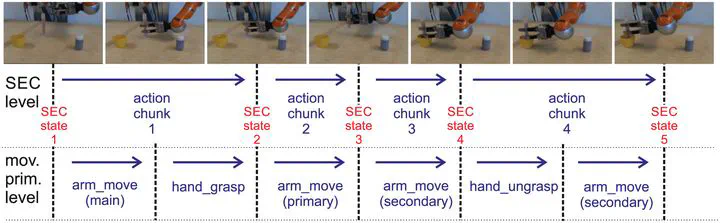 Temporal action structuring at two different hierarchical levels: semantic event chain (SEC) and movement primitives (mov. prim.).
Temporal action structuring at two different hierarchical levels: semantic event chain (SEC) and movement primitives (mov. prim.).ACAT: Learning and Execution of Action Categories
ACAT (Learning and Execution of Action Categories) was an EU FP7 project that set out to give robots the kind of tacit, background knowledge humans assume when we read everyday instructions. By mining large corpora of human-oriented text and images, the consortium distilled recurring “action categories” that bundle low-level motion primitives with rich contextual cues, e.g. how to grasp a hammer, which tool variant to choose, or what spatial pose is required for a bolt-tightening step. These reusable action categories populate a knowledge base that an on-board “robot compiler” can query to transform ordinary manuals or wikiHow-style guides into executable robot programs, dramatically reducing task-specific hand-coding. Demonstrations in industrial assembly and laboratory scenarios showed how plans generated from human instruction sheets could be generalized, refined through self-exploration, and repeatedly updated for lifelong learning.
Roles:
March 2013 - April 2016: Senior Assistant | Postdoc. @ JSI
- Built MATLAB-based GUI timeline editor for extraction of multi-modal data from ROS bags and annotation of action category information.
- Lead author of deliverable on action execution.