ReconCell: A Reconfigurable Robot Workcell
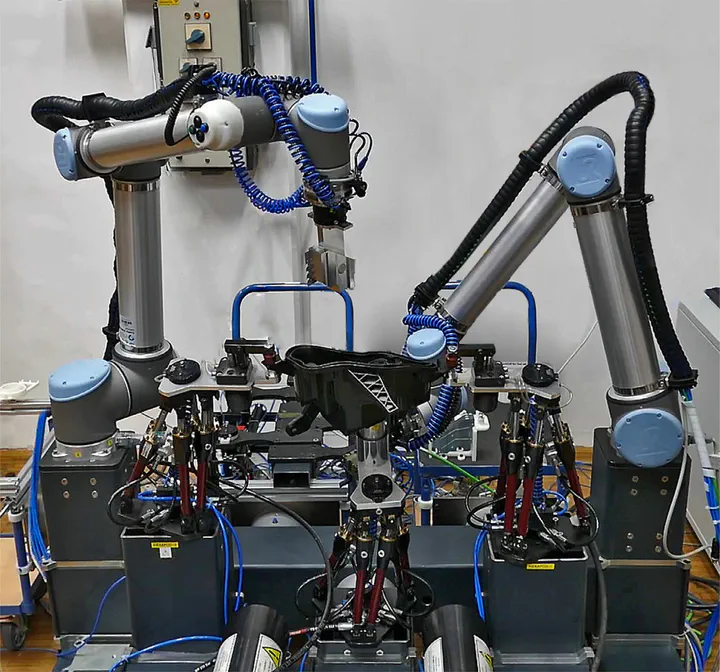 The reconfigurable robot workcell in a configuration where it assembles an automotive headlight.
The reconfigurable robot workcell in a configuration where it assembles an automotive headlight.ReconCell: A Reconfigurable Robot Workcell
ReconCell was a reconfigurable robot workcell conceived to give low-volume, high-mix manufacturers the agility of large-scale automation without the overhead. The project unites several complementary research threads: smart, passive hardware modules that can be rearranged in minutes; a ROS-based, robot-agnostic control stack that couples programming-by-demonstration with [meta-scripted state-machine generation (SMACHA) for rapid task authoring; kinesthetic-guided base-frame calibration that lets multiple collaborative robots share a common frame with millimetre accuracy; and intuitive tools for quality control, part localisation and process monitoring. Tested across automotive, electronics and bespoke assembly lines, ReconCell shows that flexible automation can be precise, economical and user-friendly—setting the stage for SME-friendly commercial deployment of truly adaptable robot workcells.
Roles
Nov 1 2015 - Feb 28 2019: Senior Assistant | Postdoc. @ JSI
- Designed SMACHA API for ROS state machine scripting & code generation.
- Co-designed ROS architecture for control of rapidly reconfigurable robotic workcell.
- Coordinator between robot control team & visual programming interface team.
Videos
Aleš Ude from ReconCell consortium - Jožef Stefan Institute
Video: ReconCell YouTube Channel. Credit: Aleš Ude, Jožef Stefan Institute.
ReconCell’s live demonstration at Automatica
Video: Innovalia YouTube Channel. Credit: Innovalia, ReconCell Consortium.
SMACHA: An API for Rapid ROS SMACH State Machine Assembly (Humanoids 2017 & IS: Robotics 2017)
Video: Barry Ridge’s YouTube Channel. Credit: Barry Ridge, Jožef Stefan Institute.