Xperience: Robots Bootstrapped through Learning from Experience
 The central idea behind the Xperience project. Image: Xperience Project Website.
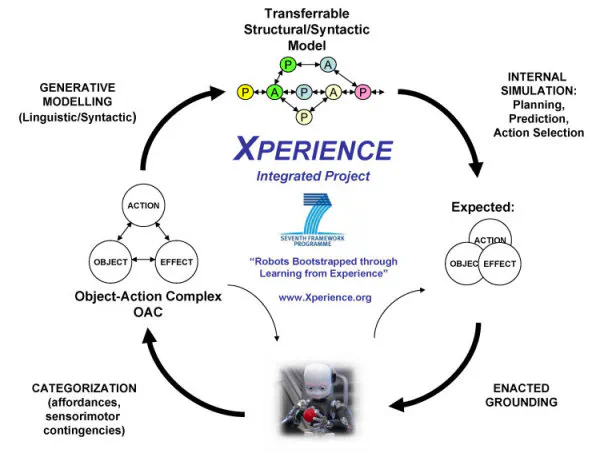
The central idea behind the Xperience project. Image: Xperience Project Website.Xperience: Robots Bootstrapped through Learning from Experience
Xperience was an EU FP7 project that investigated how robots could build on what they already know to handle new situations instead of learning every skill from scratch. Inspired by the structural bootstrapping process studied in child language acquisition, the consortium equipped humanoid platforms with generative internal models that predict the effects of candidate actions and steer exploration toward the most promising hypotheses. These models were integrated with perception, introspection and planning so that robots such as ARMAR-III could, after only a few trials, collaborate with people on everyday tasks like preparing a salad and setting a table. The project demonstrated that experience-based internal simulation shortens learning times, supports rapid generalisation and smooths human–robot interaction, pointing the way toward more adaptable, knowledge-rich cognitive robots.
Roles:
Mar 1 2012 - Dec 31 2015: Senior Assistant | Postdoc. @ JSI
- Designed novel action-grounded 3D visual feature descriptors.
- Developed methods for self-supervised bootstrapping of object affordance categories.