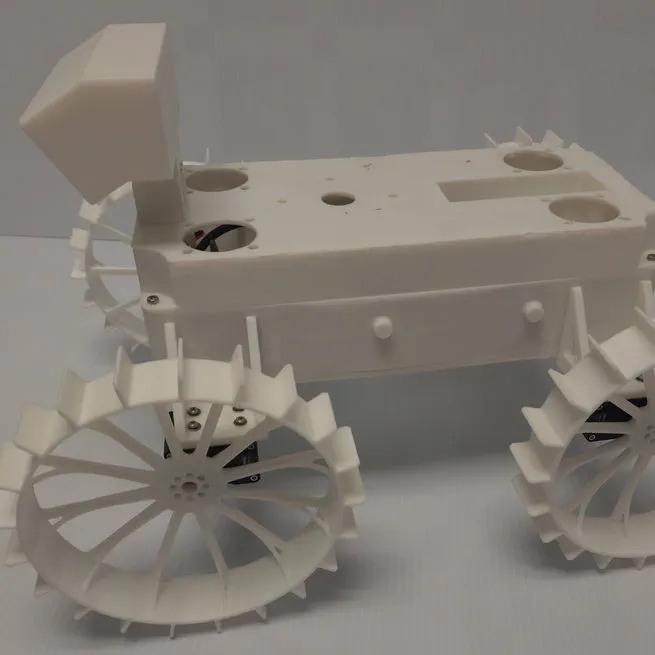
CoHORT: Cooperative Human Operations with Robot Teams
The CoHORT project aims to develop a fleet of small rovers to be used as academic research and development platforms for research on multi-agent autonomy.
Sep 3, 2024

Ingenuity Mars Helicopter
The Ingenuity Mars Helicopter was the first aircraft to achieve powered, controlled flight on another planet.
Aug 1, 2022

CADRE: Cooperative Autonomous Distributed Robotic Exploration
The CADRE technology demonstration aims to utilize a team of small, solar-powered rovers to independently explore and gather data from the Moon using mesh network radios for communication.
Jan 1, 2022

Europa Lander
The proposed Europa Lander mission is a concept study aimed at delivering a robotic lander to the ice-covered surface of Jupiter’s moon, Europa.
Jan 1, 2022

DARPA RACER: Robotic Autonomy in Complex Environments with Resiliency
DARPA's RACER program aims to revolutionize autonomy for unmanned ground vehicles (UGVs) navigating unpredictable off-road terrain at speeds comparable to human drivers.
Sep 30, 2021

DARPA Subterranean Challenge
The DARPA Subterranean (SubT) Challenge was a landmark competition aimed at developing autonomous robot teams capable of mapping, navigating, and searching underground environments.
Jan 1, 2021
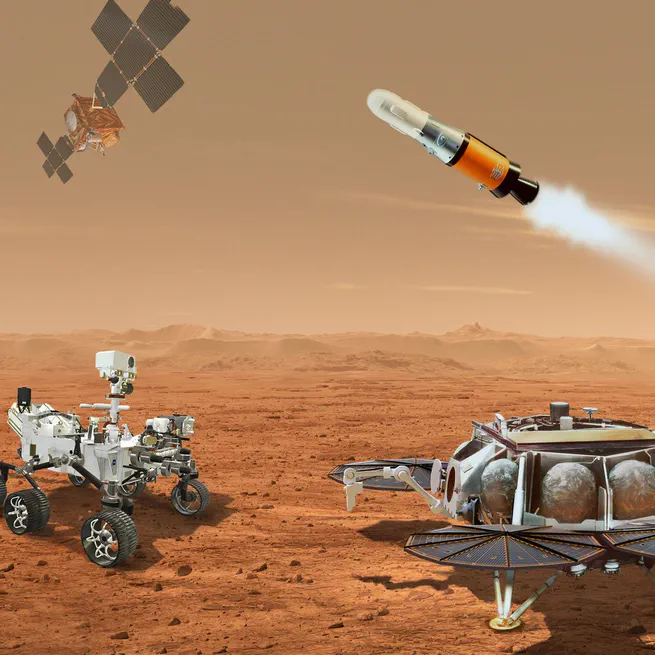
Mars Sample Return
The Mars Sample Return (MSR) mission, a joint effort between NASA and ESA, seeks to retrieve Martian rock, soil, and atmospheric samples collected by Perseverance and return them to Earth for in-depth analysis.
Feb 24, 2020
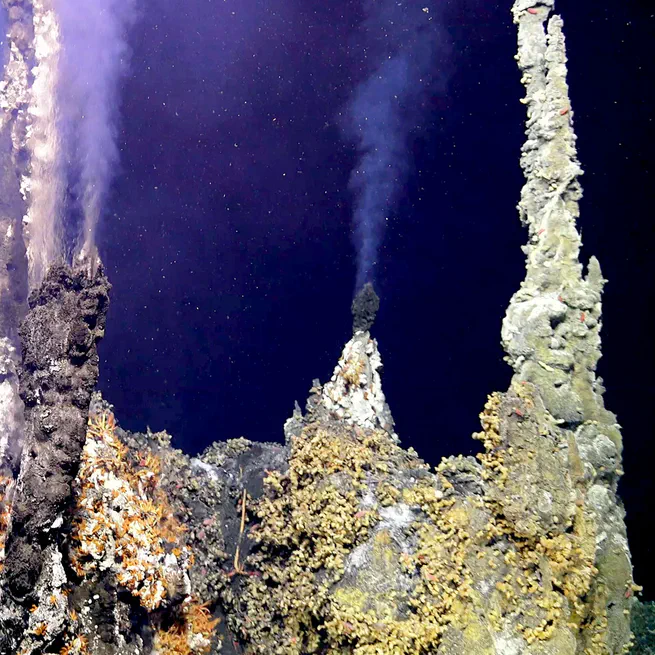
InVADER: In situ Vent Analysis Divebot for Exobiology Research
InVADER is an innovative deep-sea mission concept to send autonomous divebots underwater to perform in-situ analysis of hydrothermal vent sites.
Feb 24, 2020
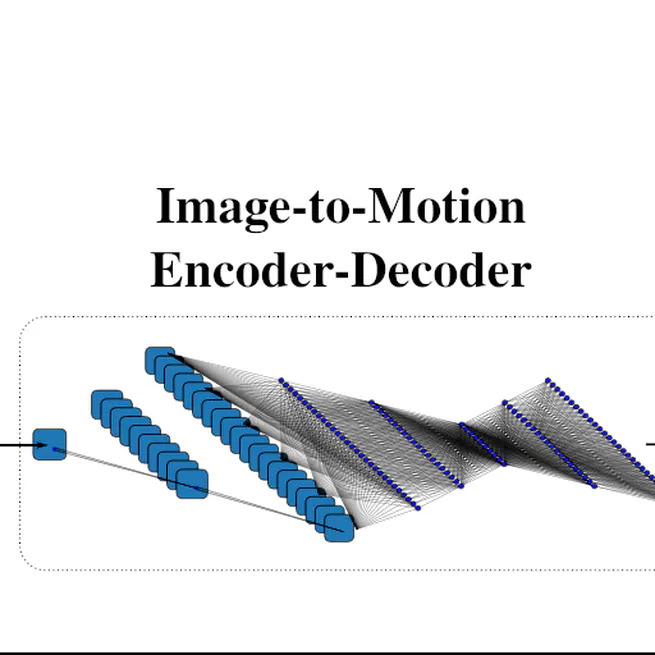
IMEDNets: Image-to-Motion Encoder-Decoder Networks
IMEDNets are deep neural network architectures to enable robots to learn visuomotor skills, specifically translating visual inputs into robot motion trajectories.
May 1, 2018
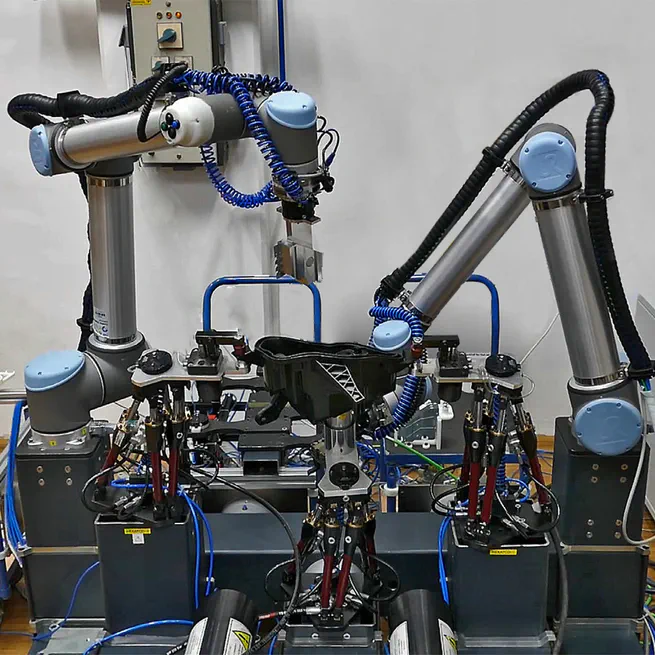
ReconCell: A Reconfigurable Robot Workcell
ReconCell was a reconfigurable robot workcell conceived to give low-volume, high-mix manufacturers the agility of large-scale automation without the overhead.
Nov 1, 2015